ELEMENTARY SURFACES
Surface (surface patch) is any non-empty subset
of the Euclidean space Φ ![]() E3, which is a continuos image of a connected region Ω
E3, which is a continuos image of a connected region Ω ![]() R2.
Analytic representation of surface is a vector function
R2.
Analytic representation of surface is a vector function
p(u,v) = (x(u,v), y(u,v), z(u,v))
defined, continuos and at least once differentiable on Ω.
Surface is a graph of vector function p(u,v).
Value of vector function at (a,b) ∈ Ω is a position vector of the surface point P(a,b)
p(a,b) = (x(a,b), y(a,b), z(a,b)).
Numbers (a,b) ∈ Ω are parametric - curvilinear coordinates of the point P(a,b) on surface.
If Ω is a regular region, we speak about surface patch.
In computer processing the parametrisation of a surface patch is usually on region Ω = < 0, 1 >2.
Vector function determines orientation of surface patch Φ.
Points on surface patch with curvilinear coordinates equal to 0 or 1,
are corner points of the surface patch P(0,0), P(1,0), P(0,1), P(1,1).
Constant values of one variable u = a, or v = b, define vector function with one variable, determining thus a curve segment, parametric v-curve, or u-curve, forming two systems of parametric curves on surface. Each parametric curve from one system intersects all parametric curves from the other system. Two parametric curves from different systems intersect in one common point P(a,b) on surface, whose curvilinear coordinates are respective constant values of parameters u and v and its position vector is
p(a,v) ∩ p(u,b) = p(a,b).
Parametric arcs on a surface patch with constant values of variables u and v are 0 or 1, are boundary curves of the surface patch. Boundary curves from different parametric systems intersect in corner points of the surface patch.
Analytic representation of surface - vector function p(u, v) = (x(u, v), y(u, v), z(u, v)) for (u,v) ∈ Ω is equivalent to surface parametric equations
x = x(u, v), y = y(u, v), z = z(u, v) , (u,v) ∈ Ω
Partial derivatives of vector function p(u,v) are vector functions
pu(u,v)=(xu(u,v), yu(u,v), zu(u,v))
pv(u,v)=(xv(u,v), yv(u,v), zv(u,v))
whose components are partial derivatives of respective coordinate functions of the vector function p(u,v).
These partial derivatives determine tangent vector to parametric u-curve for v = b and
tangent vector to parametric v-curve for u = a
at the point P(a,b), denoted pu(a,b),
and pv(a,b).
Point at the surface, at which one of the partial derivatives pu(a,b),
or pv(a,b) of the surface function is vanishing, or these derivatives are linearly dependent,
is singular point.
At regular point P(a,b), both tangent vectors to parametric curves are non-zero and linearly independent,
and they define a unique tangent plane τ to surface. Tangent plane at the surface regular point P(a,b) contain tangents to all curves on the surface passing through the tangent point.
Vector
n(a,b) = pu(a,b) x pv(a,b)
is a normal vector to surface at the regular point P(a,b). This vector is perpendicular to the surface tangent plane τ at the point, and for positively parametrised surface it is oriented to the opposite semi-space from the tangent plane then that one, which contains the surface. Line determined by normal vector and passing through the point P(a,b) is normal to the surface. Surface normal is perpendicular to tangents of all curves on surface passing through the point P(a,b) lying in the tangent plane τ.
Surface point is called elliptic, if tangent plane to surface at this point does not contain any other surface point.
Whole surface is located in one semi-plane determined by tangent plane.
All points on sphere or ellipsoid are elliptic.
Point on surface is called parabolic, if tangent plane to surface at this point is tangent to the surface at one surface curve.
Whole surface is located in one semi-space determined by tangent plane. All points on cylindrical and conical surfaces are parabolic.
Point on surface is called hyperbolic, if tangent plane to surface at this point intersects surface in a curve with a cuspidal point at the tangent point. Surface is located in both semi-planes determined by tangent plane. All points on hyperboloid are hyperbolic.
Torus is surface, on which points of all types are located. Torus is generated by rotation of circle k(S, r )
about axis lying in one plane with this circle.
All points on circles l and l , generated by points L and L on circle k through rotation about axis of rotation o (and in the same distance from this axis as the centre S of circle k), are parabolic.
Tangent planes τ and τ are perpendicular to axis o and are tangent to torus at circles l and l .
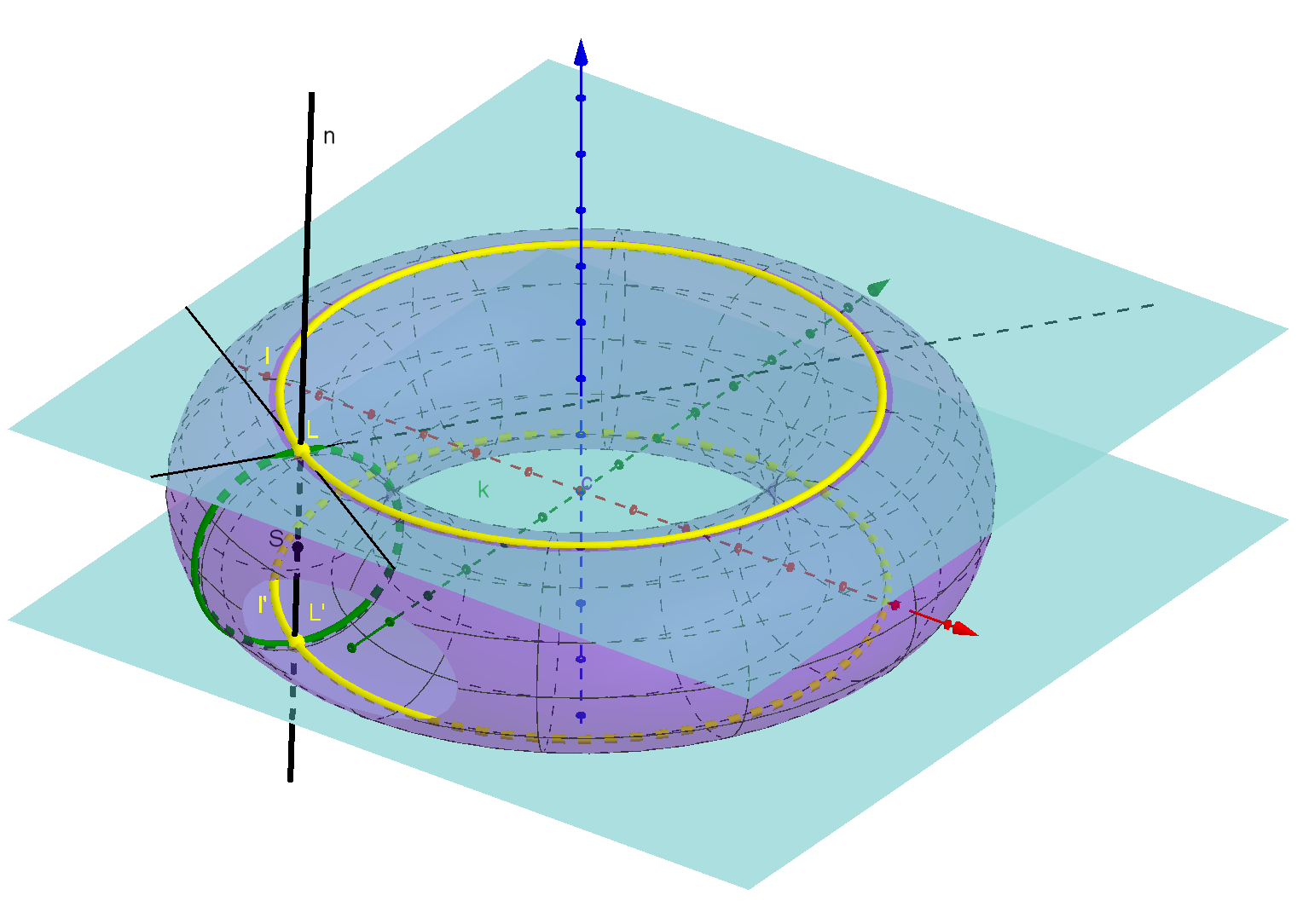
All points on torus generated by rotation of circular arc PP (positively oriented) are elliptic, tangent planes
at these points have only the tangent point in common with torus.
All points on torus generated by rotation of circular arc PP (negatively oriented) are hyperbolic,
tangent planes at these points intersect torus in curves with double points at the tangent points.
Vector of the mixed second partial derivative of the surface vector function
puv(u,v) = (xuv(u,v), yuv(u,v), zuv(u,v))
is the surface twist vector determining torsion of surface in the neighbourhood of the regular point P(a,b). Point, at which twist vector is vanishing, puv(a,b) = 0, is point of inflection, surface is a part of plane in the neighbourhood of this point.
Degree of surface is the number of maximal possible intersection points of surface with line. Plane is surface of the first degree, quadratic surfaces are of degree two, having at most two intersections with a line.
Surfaces might be generated by spatial movement of a basic curve, or by interpolation (approximation) of a discrete set of basic elements forming the basic figure. With respect to basic generating principle, the following types of surfaces might be classified:
2. Quadratic surfaces
3. Helicoids
D. Velichová, 3DGeometry