|
KoG-4/1999
|
Dagmar Szarková: Calculation of
Points on the Envelope Helical Surface Characteristic |
A New Approach
to the Computer Aided Calculation of Points on
the Envelope Helical
Surface Characteristics
A
New Approach to the Computer Aided Calculation of Points on the
Envelope Helical Surface Characteristics
ABSTRACT
Presented calculations and the choice of variables u,v Î [0,1] as curvilinear on the given basic surface
j enable the creation of a versatile programme for the graphical processing of the characteristics not only of the envelope helical, but also rotational
surface j
defined by the basic rotational surface j. Basic surface j can be generated from the basic curve
c
determined by (1) applying a class of revolutions about the coordinate axis x defined by the matrix
TR(v), for v Î [0,1] (2),
that is positioned in the space by the transformation T (3). The envelope helical surface F can by created by
helical movement of the points on the characteristics. The axis o of the helical movement located into the
coordinate axis z is the axis of the surface F .
Keywords:
envelope surface, envelope helical surface, envelope rotational surface,
characteristics, meridian section, creative space
|
|
Novi pristup numeričkom računanju točaka
na lukovima dodira ovojnice helikoidne plohe
SAŽETAK
Izloženi proračuni i izbor variabli u,v Î
[0,1] za krivolinijske koordinate na danom temelnoj plohi j
omogućuju stvaranie široko primjenlivog programa za grafičko
procesuiranje lukova dodira, kako za ovojnicu helikoidne plohe tako i za
racionalnu plohu F odredenu temeljnom
plohom j
. Temeljna ploha j
može biti generirana iz temeljme krivulje c (1) kao klasa rotacja
oko koordinatne osi x, definirana matricom TR(v)
za v Î [0,1] (2), koja je u
prostoru smještena pomoću transformacije T (3). Ovojnica
helikoidne plohe F može nastati
helikoidnim gibanjem točaka luka dodira. Os o helikoidnog gibanja,
smještena na koordinatnu os z, ujedno je i os plohe F.
Ključne riječi: ovojnica, ovojnica helikoidne plohe, ovojnica
racionalne plohe, luk dodira, meridijanski presjek, prostor
stvarania
MSC: 65D17
|
An envelope surface F is the envelope of a 1-parametric system
of surfaces created by a continuous movement of a basic surface j .
Characteristics is a curve segment along which the envelope surface F touches the basic surface
j .
The same envelope surface F can be created by the continuous
movement of characteristics. (Detailed description of envelope surfaces can
by found in Velichová [3].)
Let us deal with an envelope helical surface F created by a
helical movement (the movement is a class of geometric transformation
concatenated from a revolution movement about the axis o and a translation
movement in the direction of the vector collinear to the axis o of
revolution) of a basic surface j .
An envelope rotational
surface is a special type of the envelope helical surface with the helical
movement pitch | zv |
(zv is the translation vector corresponding to the angle of
revolution equal to 2p) equal to zero.
In the paper (Szarková [2]), the helical and rotational surface
F created from the conical or cylindrical surface
j were discussed. In the present paper, the basic surface
j will be a rotational surface created by revolving a
plane curve segment located in the xz-plane about the coordinate axis x .
We will work in the creative
space with the homogeneous coordinates (in correspondence with Qiulin [1]).
|
By the helical movement of the spherical surface G we create the
envelope surface called Archimedean serpentine. The characteristics is a
principal circle h , that is the intersection of the basic spherical
surface G and the plane x perpendicular to the tangent line to
the helix (trajectory of the movement) of the surface G centre
S .
Let G
be a spherical surface from a set of spherical surfaces, that
are tangent to the defined rotational surface j
in parallel circles. Let k be the tangent parallel circle on G .
Intersection points 1M, 2M
of circles
h and k are points of the
characteristics e . (Fig.1.) |
|
| |
Fig. 1. |
Any rotational surface j with the axis
1o in general
position can be transformed in such way that the axis of revolution will be
in one of the coordinate axis and vice versa.
Let us create the basic surface in the basic position as the surface
j´ with the axis
1o´ generated
from the basic curve c located in the xz-plane, and defined by the vector function
| (1) |
1r(u) = (x(u), 0, z(u),1)
for u Î [0, 1] |
applying a class of revolutions about the coordinate axis x defined by the
matrix TR(v),
| (2) |
 |
Let j´ is positioned in the space by the
transformation T (3),
| (3) |
T
= Toy . Toz . Tp =
|
where Toz is the revolution about the coordinate axis z by the
angle a ,
Toy is the revolution about the coordinate axis y
by the angle b ,
Tp
is the translation with the direction vector v = (xp,
yp, zp, 0) .
The basic surface is now moved from the basic position
j´ and located to the general position
j in the space determined by the chosen constant
values a , b , v .
To simplify the results, the whole scene will be transformed by the
transformation T´ (in the transposed form) (4) so that we could work with the rotational
surface j ´, with the axis 1o´
congruent
to the coordinate axis x:
| (4) |
T´= Tp . Toz .
Toy =
|
T´ and T are inverse transformations.
The axis o of the helical movement located into the coordinate axis z is
the axis of the envelope surface F . Let the axis
o by defined
by the point O(0,0,0,1) and the direction vector s(0,0, z0,0) ,
where z0 is the reduced pitch z0 = | zv |/2p .
Fig. 2.
The transformed axis o´ will be defined by the point O´(x2,
y2, z2,1) :
(x2, y2, z2,1) = (0,0,0,1)
. T´
and by the direction vector s´(x1, y1,
z1,0) :
(x1, y1, z1,0) = (0,0,z0,0)
. T´
The analytic representation of the parallel circle k on the surface
j´ that is located in the plane parallel to the
yz-plane and is incident to the point L(u0,0) = r(u0) =
(x(u0), 0, z(u0),1) , u0
Î [0, 1] on the basic curve c is in the form
|
(5)
|
2r(v) = (x(u0), rk sin(2pv), rk cos(2pv),1)
for v Î [0, 1]
|
where the radius of the parallel circle rk = z(u0) .
The common tangent plane t to the surface
j ´
and the auxiliary tangent spherical surface G in the point
L on
the basic curve c will be determined by the tangent vector
tu to
the curve c in the point L and the tangent vector tv to the
v-isoparametric curve on the surface j´
determined by the first derivative of the function (5) in the point L .
Tangent plane direction vectors
tu = 1r´(u0) = (x´(u0),
0, z´(u0), 0), where x´(u0)
 0
0
tv
= 2r´(0) = (0, 1, 0, 0) ,
define normal vector
n = tu x tv
= (-z´(u0), 0, x´(u0), 0)
The normal line q with the direction vector n
x
= x(u0) - z´(u0). l
y = 0
z
= z(u0) - x´(u0). l
for l Î [- ,
]
, u0 Î [0, 1]
,
]
, u0 Î [0, 1]
intersects the coordinate axis x in the point S´, which is the
centre of the auxiliary tangent spherical surface G´:
|
S´(xG, 0, 0, 1) =
|
|
The point S(xS, yS, zS,1)
located on the axis 1o is defined by
the transformation T (3) :
(xS, yS, zS,1) = (0,0,0,1)
. T
The tangent line to the helix, which is the trajectory of the point S
movement, is parallel to the basic line on the direction conical surface
located in the point P(yS,-xS,0,1). (The construction can by found
in Velichová [3].)
The tangent line to the helix in the point
S can be determined by the
direction vector t(-yS, xS, (-1)iz0, 0). Constant value
i = 1 is valid for the clockwise and i = 2
for the anticlockwise helical
movement.
By the transformation T´ (4) of the vector t
we can obtain the coordinates of the direction vector t´(xt, yt, zt, 0)
of the tangent line to the helix of the point S´ with axis o´
(xt, yt, zt,0) = (-yS, xS, (-1)iz0, 0)
. T´
Centre S´ is incident to the plane x
perpendicular to the vector
t´, and is determined implicitly by the equation
xt(x - xG) + yt y +
zt z = 0
Plane x intersects the parallel circle k (6) located in the plane
m´// m (7)
| (6) |
(x - x(u0)2 + z2
= z(u0)2
|
|
(7)
|
x
= x(u0)
|
in the points 1M´, 2M´ of the constructed
characteristics e´ on the surface j
´.
Their coordinates are defined as follows
| (8) |
 |
The parameter jt can be calculated from the quadratic equation (9) that
is the solution of the equations (6) - (8)
| (9) |
 .
. |
for the value yt
0.
| If |

|
is a negative number, the points of the characteristics do not exist.
For D  0
0
It is necessary to eliminate the case of the tangent line to the helix of
the point S´ determined by the direction vector t´ that is located in the
xz-plane.
By transformation T (3) of the point M´(x´, y´,
z´,1)
of the characteristics e´
on the surface j ´ we can obtain the coordinates of the
point M(xM, yM, zM,
1) of the characteristics e
(xM, yM, zM,
1) = (x´, y´,
z´,1) . T .
The shape of the envelope surface can be better comprehended by its meridian
section than by the characteristics, which is usually a space curve segment.
Coordinates of the point M* = (x*, y*, z*,1)
located on the meridian section in the xz-plane
can be obtained from the coordinates of the point M = (xM, yM, zM, 1) on the characteristics, as the solutions of
the following equations
where w is the directed angle of the revolution about the axis
o
to the xz-plane oriented in the helical movement direction and constant
value i = 1 is valid for the clockwise and i = 2
for the anticlockwise
helical movement.
If the surface j is a rotational conical or cylindrical
surface, then we can create the envelope surface F
by the presented method, but also by the method published in the paper (Szarková [2]).
Graphical processing of the helical envelope surfaces created from the
rotational surfaces by the two given different methods can be compared on
illustrations in figures 3 and 4 presented in the paper (Szarková [2]) and
figures 4 and 5 presented in this paper.
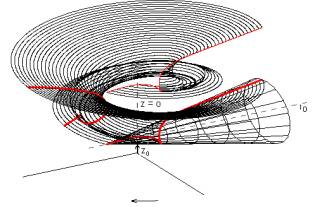
In the paper (Szarková) [2] the created envelope helical surface
F had been represented as the net of parts of characteristics
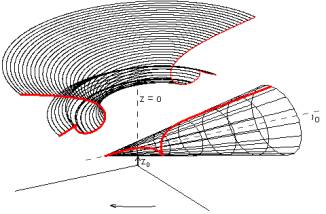
in the Fig.3, resp. as the net of meridian section segments in the Fig.5. In this paper the same helical envelope surface F
is represented
as the net of helices that are trajectories of some points
on characteristics in the Fig.3 and on meridian section in the Fig.4.
 |
 |
|
Fig. 3 |
Fig. 4 |
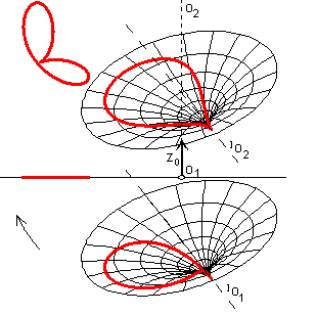
Fig. 5.
In the Fig.5 the characteristics and the meridian section of the envelope
helical surface F determined by the basic rotational surface
j with the basic curve in a cissoid is
illustrated.
The envelope helical surface created from the basic rotational surface j with the basic curve in a Witch of
Agnési is
represented as the net of helices that are trajectories of the points
on characteristics in the Fig.6.
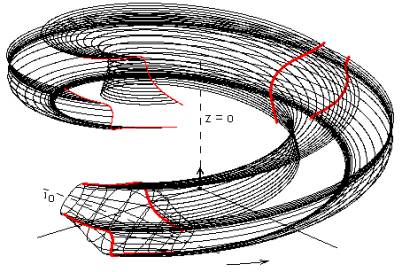
Fig. 6.
The formulas for the calculations are a bit complicated, but the computer
processing is very fast. The general advantage of the computer approach to
the given problematic dwells in its creative access. The interactive access
available for the constructor helps him to realise the design of the
elaborating machines in a short time, as it provides the possibility to fix
the generating surface of the created envelope surface into the desired position. It is possible to exclude efficiently those positions, in which
the envelope surface cannot be created (does not exit) or is of an
unsuitable design.
Presented figures are examples of the characteristics, the meridian section
and the basic surface j of the envelope surface
F projected in the Monge projection method and Axonometry and visualised as
outputs of the programme (written by the author) on the screen.
References
| [1] |
Qiulin,D.-Davies,B.J.: Surface Engineering Geometry for Computer -
Aided Design and Manufacture. 1. ed. Chichester, Ellis Horwood Limited
1987, 340 p. |
| [2] |
Szarková,D.: Computer Aided Calculation of Characteristics Points of
Some Envelope Helical Surfaces, KoG, 2, pp. 49-51 |
| [3] |
Velichová,D.: Constructional geometry I, II., 1. ed. Bratislava,
Vydavatelstvo STU 1997, 81, 98 p. |
RNDr. Dagmar Szarková
Department of Mathematics
Mechanical Engineering Faculty
Slovak Technical University
Námestie Slobody 17, 812 31 Bratislava, Slovakia
tel: +4217 57296 394, fax: +4217 52926626
e-mail: szarkova@sjf.stuba.sk
|
