4
PROCEEDINGS OF SEMINARS ON COMPUTATIONAL GEOMETRY SCG'2000, VOLUME 9, pp. 96-102
Plochy konstantního spádu
Kamil Maleček1, Dagmar Szarková2 1FSv ČVUT Praha, Thákurova 7, 166 29 Praha 6, ČR, e-mail: kamil@mat.fsv.cvut.cz
2SjF STU Bratislava, Nám. Slobody 17, 812 31 Bratislava, SR, e-mail: szarkova@sjf.stuba.sk
Abstrakt
V
přípěvku definujeme plochy konstantního spádu vzhledem k dané
rovině Klíčová slova: Plocha konstantního spádu, přímková plocha, plocha rotační, plocha rozvinutelná
ÚvodPlochou
konstantního spádu v euklidovském prostoru E3
budeme nazývat přímkovou plochu, jejíž tvořicí přímky
mají stejnou odchylku g Î (0, V
této práci budou tvořicí přímky plochy
Matematický popis ploch konstantního spáduV E3,
popř. v jeho zaměření
V(E3), zvolme kartézskou
soustavu souřadnic
s je oblouk křivky
jsou vektorové funkce
Frenetova repéru křivky Směrové
vektory tvořicích přímek v bodech křivky
Plocha konstantního spádu je parametrizovaná vektorovou funkcí
Volbou e = 1 nebo
e = -1 dostaneme
obecně dvě různé plochy Plocha
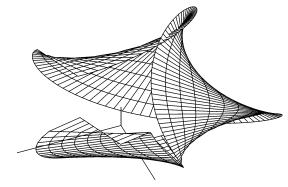
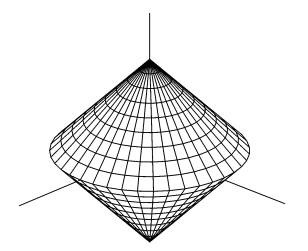
Příklad plochy konstantního spáduPříklad 1 : Řídicí
křivka
Vektorové funkce
Frenetova repéru evolventy
Funkci w zvolme takto:
Podle (4) má plocha
Část plochy je zobrazena na obr. 1a, na obr. 1b je její pravoúhlý průmět do roviny xy .
Rovina
(w = ± 1 podle toho
zda k je sudé či liché).
Vektorová funkce popisuje dvojici rovin k1
a k2 , které mají
spád s vzhledem k rovině
Rotační plochy konstantního spáduRotační plochy
konstantního spádu dostaneme, je-li řídicí křivka Kružnice
Vektorové funkce jejího Frenetova repéru jsou
Nechť pro Podle (4) má plocha k parametrické vyjádření
Vyloučením parametrů s a u z rovnic (10) dostaneme rovnici
Mohou nastat tři případy:
Rovnice (11) má tvar
a to je rovnice rotačního zborceného
hyperboloidu se středem v počátku O , kružnice
Rovnice (11) pro toto je
a to je rovnice kuželových ploch k1 a
k2 souměrných podle
roviny Platí tedy tvrzení: Rotační plocha konstantního spádu s , s Î(0,+¥) , je buď rotační zborcený hyperboloid nebo rotační kuželová plocha.
Torzální tvořicí přímky plochy konstantního spáduPředpokládejme, že řídicí
křivka
Derivace vektorových funkcí (12) jsou
což jsou Frenetovy vzorce, a proto
Hodnoty funkce k(s) jsou křivosti
křivky
Vektorová funkce (15) popisuje směrové vektory tečen parametrických s-křivek. Pro u = 0 je
a pro u = 1 je
Aby pro nějaké s byla tvořicí přímka torzální, musí být vektory (16) a (17) lineárně závislé. To bude právě tehdy, když
tedy i)
ii)
Pokud je jedna z rovnic i) nebo ii) splněna pro určité s ÎI , pak příslušná tvořicí přímka je torzální. Určíme torzální tvořicí přímky plochy z příkladu 1, která má parametrické vyjádření (7) . Pro plochu je
Rovnice i) je splněna pro
a tomuto parametru přísluší torzální tvořicí přímka plochy. Další torzální přímky plochy dostaneme z rovnic ii), která pro tuto plochu je
Na intervalu Z rotačních ploch konstantního spádu je rotační hyperboloid plocha zborcená, neboť
Ani jedna z rovnic i) a ii) není splněna. Plocha nemá torzální tvořicí přímky. Naopak
v případě rotační kuželové plochy je w(s) = c , c = k
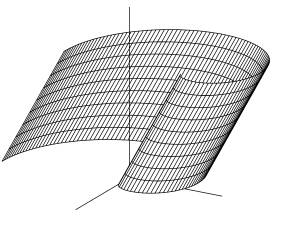
Rozvinutelné plochy konstantního spáduPlocha k konstantního spádu bude rozvinutelná plocha, jestliže rovnice i) nebo ii) budou platit pro všechna s ÎI . Pomocí (12) můžeme přepsat směrové vektory (3) tvořicích přímek plochy k takto:
Jestliže rovnice i) je na intervalu I identitou, pak vektory (19) jsou
a plocha je válcová
plocha. Křivka Na obr. 6
jsme zobrazili část válcové plochy, jejíž řidicí křivka
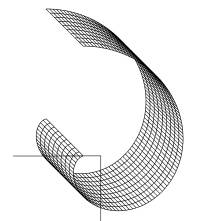
Je-li rovnice ii) na intervale I identitou, pak plocha je parametrizovaná vektorovou funkcí
Pravoúhlé průměty
tvořicích přímek do roviny Takže platí tvrzení: Rozvinutelné
plochy konstantního spádu, dané řídicí křivkou 1) válcové plochy, 2)
plochy, u kterých jsou pravoúhlé průměty tvořicích přímek
do roviny
|